
System Architecture
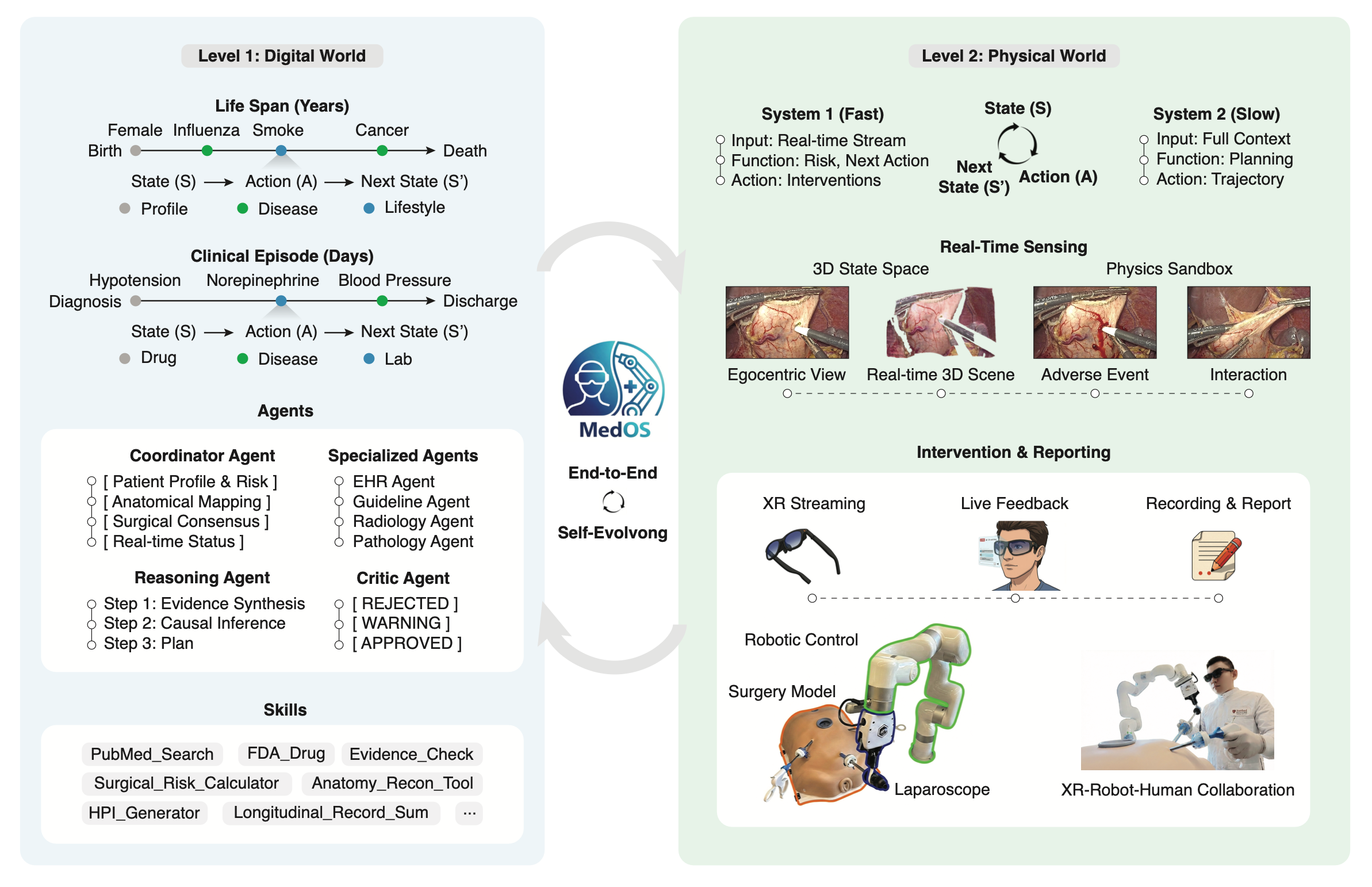
MedOS constructs an Agentic World Model that fundamentally understands surgical physics, with the State-Action-Transition loop:
Not just input, but a deep understanding of the environment.
Actions that actively change the physical world.
Predicted future state, not just output.
Mimicking the training path of human surgeons, we employ a "hindsight-driven" distillation paradigm.
Slow
Fast
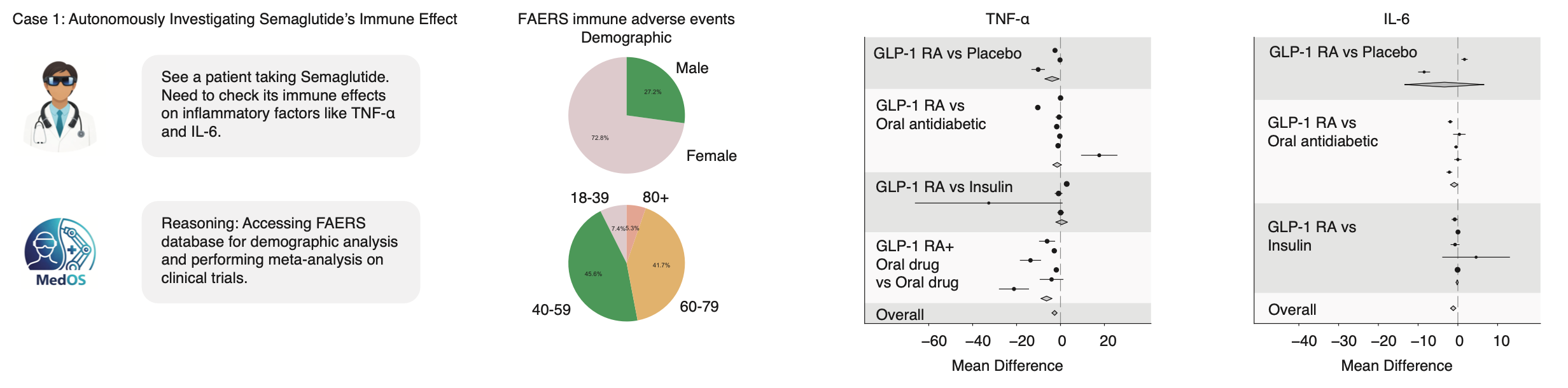
From a single patient observation, MedOS autonomously queries the FAERS database to analyze adverse events and performs meta-analysis on inflammatory factors (TNF-α, IL-6).
Agentic Workflow: Observation → FAERS Query → Meta-Analysis → Hypothesis Verification
We present MedSuperVision, the largest open-source surgical video dataset to date. Curated by board-certified surgeons, it features 85,398 hours of diverse procedures and high-fidelity annotations.
Dataset Overview Part 1
Dataset Overview Part 2
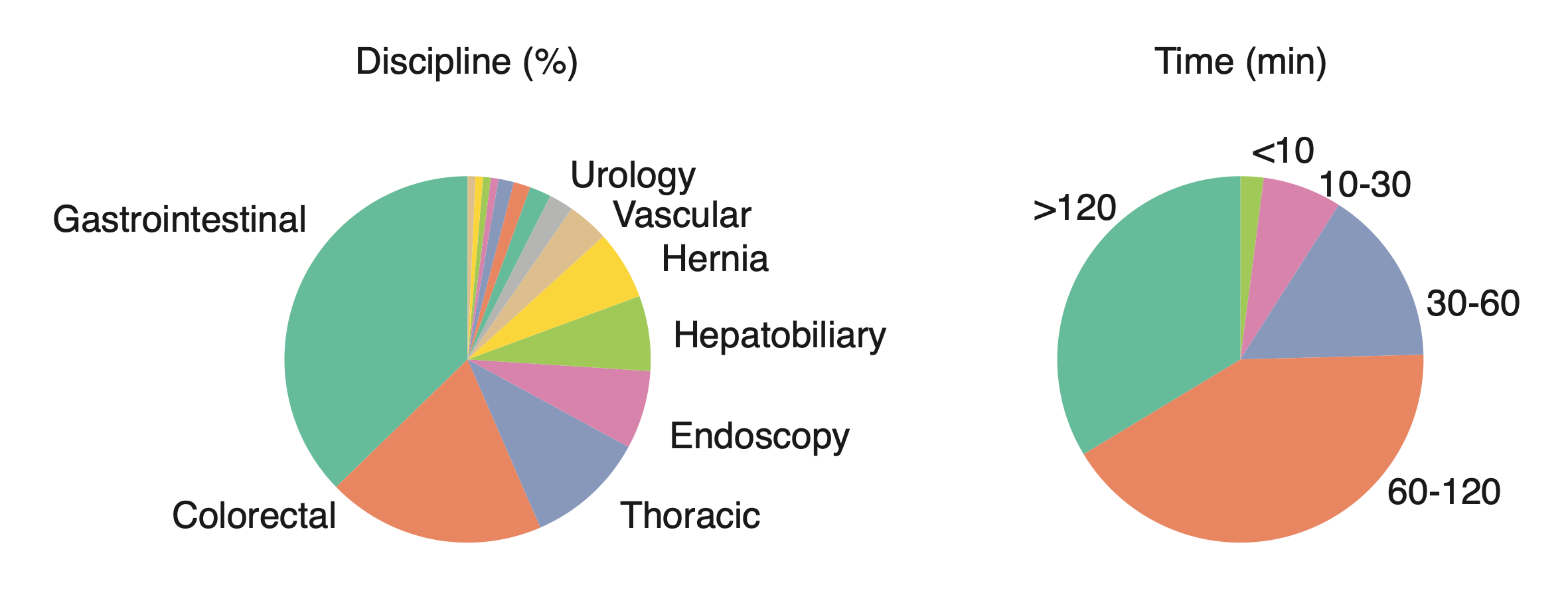
Comprehensive analysis of procedure types and data distribution.
One of the most impactful findings is the system's ability to level the playing field. In human-AI collaboration studies, MedOS enabled nurses and medical students to achieve diagnostic precision comparable to attending physicians. Furthermore, it acted as a cognitive safety net, restoring the performance of post-call doctors to levels better than their well-rested baseline.
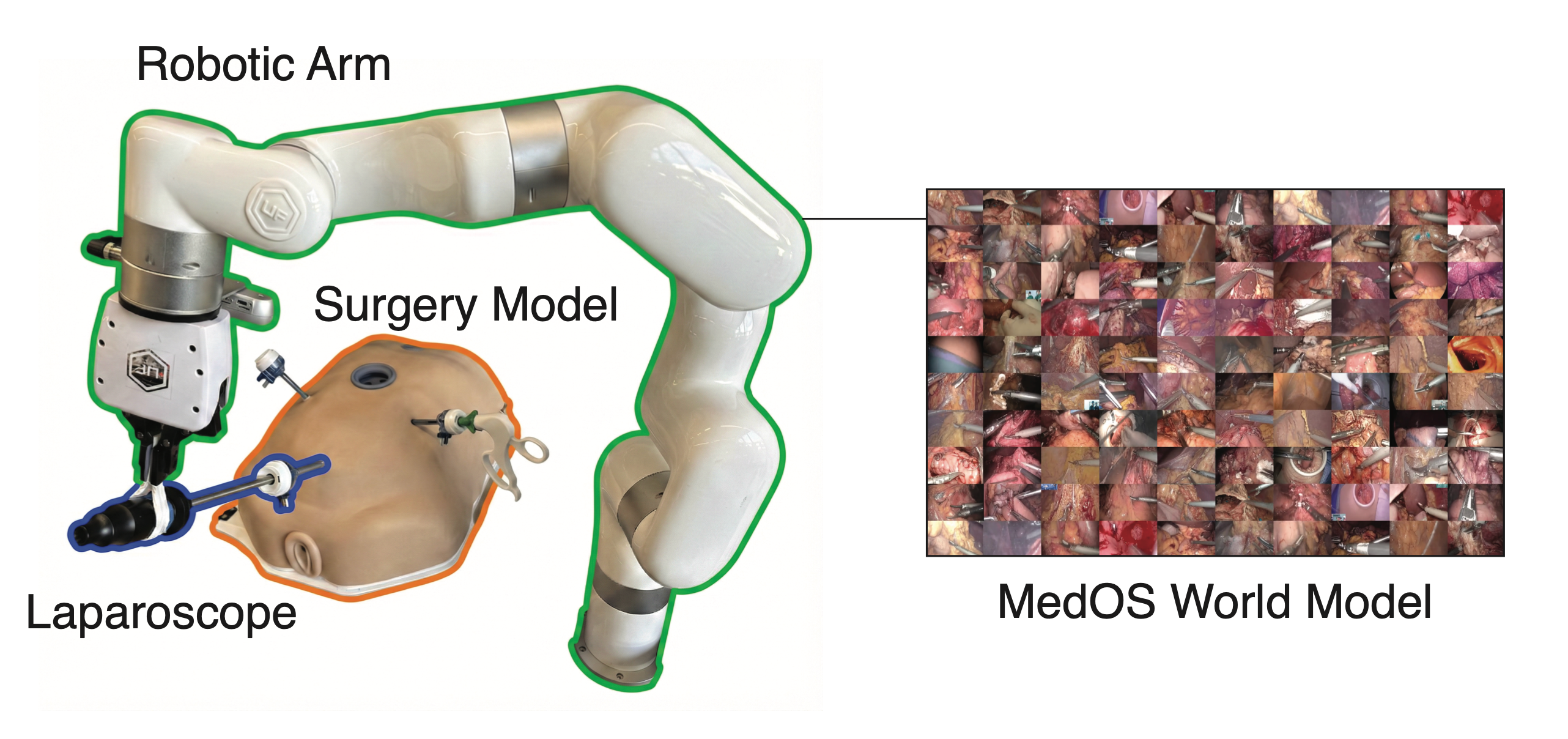
Eliminating human tremor and drift for surgical precision.

Immersive Human-AI Symbiosis. The setup (Left) allows the operator to control the robotic arm with intuitive XR feedback, enabling the human-AI team to outperform traditional manual surgery in speed and fluidity.
Powered by MedOS, our autonomous agent can execute complex surgical tasks with precision and adaptability in simulated environments.
Autonomous Case Study 1
Autonomous Case Study 2


Contributors include:
Yingcheng Charles Wu


Request Early Access for Research & Clinical Trials
Whether you are an AI researcher, a clinician, or a roboticist, tell us your use case.